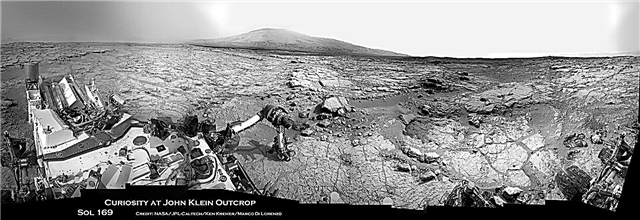
Bildunterschrift: Curiosity führt an dieser Stelle, an der der Roboterarm auf die Oberfläche des Roten Planeten am John Klein-Aufschluss von geäderten hydratisierten Mineralien drückt, historische erste Bohrungen in Marsgestein durch. Dieses Panorama-Fotomosaik mit Navcam-Kamerabildern wurde am 25. und 26. Januar 2013 oder Sols 168 und 169 aufgenommen und zeigt ein Selbstporträt von Curiosity, das mit ihrem ultimativen Ziel, dem Mount Sharp, dramatisch zurückgefallen ist. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Der lang erwartete und geschichtsträchtige erste Einsatz einer Übung auf dem Mars wird am Donnerstag, dem 31. Januar 2013, oder Sol 174, vom Rover des Curiosity Mars Science Lab (MSL) der NASA stattfinden, wenn alles gut geht, so das Wissenschaftsteam Mitglied Ken Herkenhoff von der USGS.
Der erste Bohrvorgang von Curiosity besteht darin, ein Testloch in ein flaches Gestein an der Stelle zu hämmern, an der der Rover derzeit an einem wissenschaftlich interessanten Felsvorsprung mit geäderten Mineralien namens „John Klein“ geparkt ist. Sehen Sie sich unsere Mosaike oben und unten an, die den aktuellen Standort von Curiosity veranschaulichen.
„Bei diesem Test werden keine Bohrrückstände gesammelt, bei denen nur der Schlagbohrmodus (nicht Rotation) verwendet wird“, sagt Herkenhoff.
Curiosity ist ein unglaublich komplexer Roboter, dessen Bedienung das Team noch lernt. Der Plan könnte sich also kurzfristig ändern.
Die tatsächliche Lieferung von Bohrrückständen an die CheMin- und SAM-Analyselabors von Curiosity ist noch mindestens einige Tage oder länger entfernt und muss auf eine Überprüfung der Ergebnisse des Testbohrlochs und weitere Bohrtests warten.
"Wir gehen bei der Herangehensweise an die ersten Bohrungen von Curiosity mit Vorsicht vor", sagte Daniel Limonadi, der leitende Systemingenieur für das Oberflächenprobenahme- und Wissenschaftssystem von Curiosity am Jet Propulsion Laboratory (JPL) der NASA. „Das ist eine Herausforderung. Es wird das erste Mal sein, dass ein Roboter in einen Felsen gebohrt hat, um eine Probe auf dem Mars zu sammeln. “
Auf der Sol 166 fuhr Curiosity etwa 3,5 Meter, um den John Klein-Aufschluss zu erreichen, den das Team als erste Bohrstelle ausgewählt hatte. Der Rover in Wagengröße untersucht eine flache Vertiefung, die als „Yellowknife Bay“ bekannt ist. Dort hat sie weit verbreitete Beweise für wiederholte Episoden des uralten Flusses von flüssigem Wasser in der Nähe ihres Landeplatzes im Gale Crater auf dem Mars gefunden.
In Erwartung des geplanten Bohrvorgangs am Donnerstag führte der Rover am Montag (27. Januar) eine Reihe von vier Vorlasttests durch, bei denen der Rover den Bohrer auf Marsoberflächenziele am John Klein-Aufschluss platzierte und nach unten drückte auf dem Bohrer mit dem Roboterarm. Die Ingenieure überprüften dann die Daten, um festzustellen, ob die angewendete Kraft mit den Vorhersagen übereinstimmte.
"Der Arm wurde über Nacht gegen einen von ihnen gedrückt, um zu sehen, wie sich der Druck mit der Temperatur änderte", sagt Herkenhoff.

Bildunterschrift: Der Roboterarm von Curiosity platziert den Werkzeugarm des Roboterarms und das Instrument des Alpha-Partikel-Röntgenspektrometers (APXS) auf dem Aufschluss von John Klein, der in diesem Fotomosaik gezeigt wird, das mit der Mastcam 34-Kamera am 25. Januar 2013 oder Sol 168 aufgenommen wurde Der Bohrer und die Zinken zeigen direkt auf den Werkzeugrevolver. Bildnachweis: NASA / JPL-Caltech / MSSS / Ken Kremer / Marco Di Lorenzo
Da auf dem Mars jeden Tag große Temperaturschwankungen auftreten (über 65 ° C), muss das Team feststellen, ob der Arm möglicherweise übermäßig belastet wird, während der Bohrer auf die Marsoberfläche gedrückt wird. Die täglichen Temperaturschwankungen können dazu führen, dass sich Rover-Systeme wie Arm, Fahrgestell und Mobilitätssystem um etwa einen Zehntel Zoll (etwa 2,4 Millimeter) ausdehnen und berühren, etwas mehr als die Dicke einer US-Viertel-Dollar-Münze.
"Wir planen nicht, den Bohrer über Nacht in einem Felsen zu lassen, sobald wir mit dem Bohren beginnen. In diesem Fall ist es jedoch wichtig zu wissen, was in Bezug auf die Belastung der Hardware zu erwarten ist", sagte Limonadi. „Dieser Test wird bei niedrigeren Vorspannungswerten durchgeführt, als wir beim Bohren verwenden möchten, damit wir die Temperatureffekte kennenlernen können, ohne die Hardware zu gefährden.“
Der hochauflösende mikroskopische MAHLI-Imager auf dem Armrevolver nimmt vor und nach den Bildern des Aufschlussziels Nahaufnahmen auf, um den Erfolg des Bohrvorgangs zu beurteilen.
Auf Sol 175 ist eine weitere bedeutende Aktivität geplant, bei der eine der von der Erde mitgebrachten "leeren" organischen Kontrollproben zur Analyse an das SAM-Instrument geliefert wird, um festzustellen, ob Spuren einer terrestrischen Kontamination organischer Moleküle vorliegen und ob die Proben übergeben werden Das System wurde früher in der Mission an der vom Wind verwehten Sandwelle von Rocknest erfolgreich gereinigt.
Auf der gegenüberliegenden Seite des Mars startet der Opportunity Rover der NASA das zehnte Jahr und untersucht nie zuvor berührte Schichtsilikat-Tonmineralien, die sich vor Äonen in fließendem flüssigem Wasser am Endeavour-Krater gebildet haben - hier beschrieben.
Seien Sie gespannt auf aufregende Ergebnisse der Marsschwestern der NASA.

Bildunterschrift: Blick auf den Mount Sharp von Curiosity in Yellowknife Bay und John Klein. Dieses Fotomosaik wurde am 27. Januar 2013 mit der Mastcam 34-Kamera oder Sol 170 aufgenommen. Bildnachweis: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer

Curiositys Bohrer für Lasttests vor dem Bohren. Der Schlagbohrer im Werkzeugrevolver am Ende des Roboterarms des Marsrovers Curiosity der NASA wurde in diesem Bild von der vorderen Hazard-Avoidance-Kamera (Hazcam) des Rovers in Kontakt mit der Felsoberfläche positioniert. Bildnachweis: NASA / JPL-Caltech

Bildunterschrift: Curiosity fand weit verbreitete Hinweise auf fließendes Wasser in der äußerst vielfältigen, felsigen Landschaft, die in diesem Fotomosaik vom Rand der Yellowknife Bay auf Sol 157 (14. Januar 2013) gezeigt wird, bevor sie zum Aufschluss von John Klein oben rechts fuhr. Der Rover bewegte sich dann und ist jetzt an den flachen Felsen am John Klein-Aufschluss geparkt. Er soll hier am 31. Januar 2013 historische 1. Marsfelsenbohrungen durchführen. 'John Klein' ist mit zahlreichen Mineraladern gefüllt, die stark auf Niederschläge von hinweisen Mineralien aus flüssigem Wasser. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo