Missionsplaner hassen es wirklich, wenn Weltraumroboter vom Kurs abweichen. Wir verbessern heutzutage sicherlich die Erfolgsaussichten (erinnern Sie sich an die sieben Minuten des Terrors von Mars Curiosity?), Aber eine Raumfahrtagentur hat einen ausgefallenen Simulator im Ärmel, der Landungen noch präziser machen könnte.
Wie oben gezeigt, beeindruckte diese Software und Hardware (getestet von der Europäischen Weltraumorganisation) das französische Luft- und Raumfahrtzentrum ONERA so sehr, dass Beamte dem leitenden Forscher kürzlich eine Auszeichnung für die Arbeit verliehen.
"Wenn ich ein Tourist in Paris bin, suche ich möglicherweise nach dem Weg zu berühmten Sehenswürdigkeiten wie dem Eiffelturm, dem Arc de Triomphe oder der Kathedrale Notre Dame, um meine Position auf einer Karte zu finden", erklärte Jeff Delaune, Ph.D. . Student, der die Forschung durchführt.
"Wenn der gleiche Vorgang aus dem Weltraum wiederholt wird und genügend Oberflächenmarkierungen von einer Kamera, dem Auge des Raumfahrzeugs, gesehen werden, kann er ziemlich genau erkennen, wo er sich befindet, indem er die visuellen Informationen automatisch mit Karten vergleicht, die wir im Computer an Bord haben."

Da die Nahaufnahme von Orientierungspunkten von weitem sehr unterschiedlich aussehen kann, verfügt dieses System über eine Methode, um dieses Problem zu umgehen.
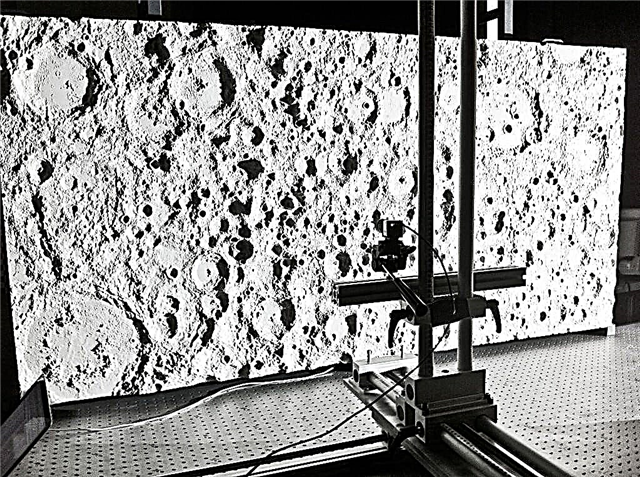
Das sogenannte LION-System (Landing with Inertial and Optical Navigation) nimmt die von der Kamera des Raumfahrzeugs erzeugten Echtzeitbilder auf und vergleicht sie mit Karten früherer Missionen sowie digitalen 3D-Modellen der Oberfläche.
LION kann die relative Größe jedes Punktes berücksichtigen, egal ob es sich um einen riesigen Krater oder einen winzigen Felsbrocken handelt.
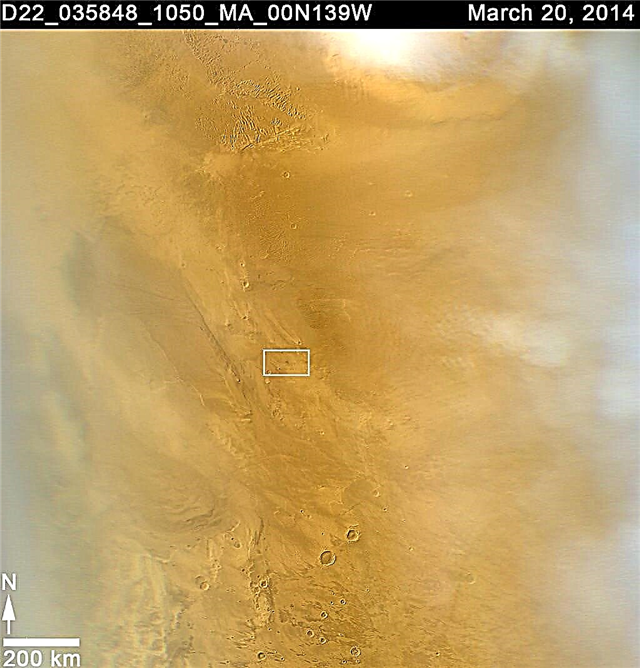
Im Kontrollhardwarelabor der ESA in Noordwijk, Niederlande, testeten Beamte das System mit einer hochauflösenden Mondkarte.
Obwohl dies nur ein Test ist und es noch einiges zu tun gibt, bis dieses System weltraumtauglich ist, sagte die ESA, dass die simulierte Positionsgenauigkeit besser als 164 Fuß in 1,86 Meilen Höhe (oder 50 Meter in drei Kilometern Höhe) war.
Oh, und obwohl es bisher nur mit simuliertem Mondgelände getestet wurde, ist es möglich, dass dasselbe System einem Roboter hilft, auf einem Asteroiden oder Mars zu landen, fügt die ESA hinzu.
Kein Wort darüber, wann das System zum ersten Mal eine interplanetare Fahrt ankuppeln wird, aber Delaune arbeitet daran, die Forschung auf terrestrische Angelegenheiten wie unbemannte Luftfahrzeuge anzuwenden.
Weitere Informationen zu den Tests finden Sie auf der ESA-Website.
Quelle: ESA